






伺服阀的主阀一般来说和换向阀一样是滑阀结构,只不过阀芯的换向不是靠电磁铁来推动,而是靠前置级阀输出的液压力来推动,这一点和电液换向阀比较相似,只不过电液换向阀的前置级阀是电磁换向阀,而伺服阀的前置级阀是动态特性比较好的喷嘴挡板阀或射流管阀。
也就是说,伺服阀的主阀是靠前置级阀的输出压力来控制的,而前置级阀的压力则来自于伺服阀的入口p,假如p口的压力不足,前置级阀就不能输出足够的压力来推动主阀芯动作。
而我们知道,当负载为零的时候,如果四通滑阀完全打开,p口压力=t口压力+阀口压力损失(忽略油路上的其它压力损失),如果阀口压力损失很小,t口压力又为零,那么p口的压力就不足以供给前置级阀来推动主阀芯,整个伺服阀就失效了。所以伺服阀的阀口做得偏小,即使在阀口全开的情况下,也要有一定的压力损失,来维持前置级阀的正常工作。
伺服阀其实缺点极多:能耗浪费大、容易出故障、抗污染能力差、价格昂贵等等等等,好处只有一个:动态性能是所有液压阀中高的。就凭着这一个优点,在很多对动态特性要求高的场合不得不使用伺服阀,如飞机火箭的舵机控制、汽轮机调速等等。动态要求低一点的,基本上都是比例阀的天下了。
一般说来,好像伺服系统都是闭环控制,比例多用于开环控制;其次比例阀类型要多,有比例压力、流量控制阀等,控制比伺服要灵活一些。从他们内部结构看,伺服阀多是零遮盖,比例阀则有一定的死区,控制精度要低,响应要慢。但从发展趋势看,特别在比例方向流量控制阀和伺服阀方面,两者性能差别逐渐在缩小,另外比例阀的成本比伺服阀要低许多,抗污染能力也强!
液压伺服系统的特点如下:
(1)反馈。把输出量的一部分或全部按一定方式回送到输入端,并和输入信号进行比较,这就是反馈。在上例中,反馈(测速装置输出)电压和给定(输入信号)电压是异号的,即反馈信号不断地抵消输入信号,这是负反馈。自动控制系统大多数是负反馈。
(2)偏差。要使液压缸输出一定的力和速度,伺服阀必须有一定的开口量,因此输入和输出之间必须有偏差信号。液压缸运动的结果又力图消除这个误差。但在伺服系统工作的任何时刻都不能完全消除这一-偏差,伺服系统正是依靠这一-偏差信号进行工作的。
(3)放大。执行元件(液压缸)输出的力和功率远远大于输入信号的力和功率,其输出的能量是液压能源供给的。
(4)跟踪。液压缸的输出量完全跟踪输入信号的变化。

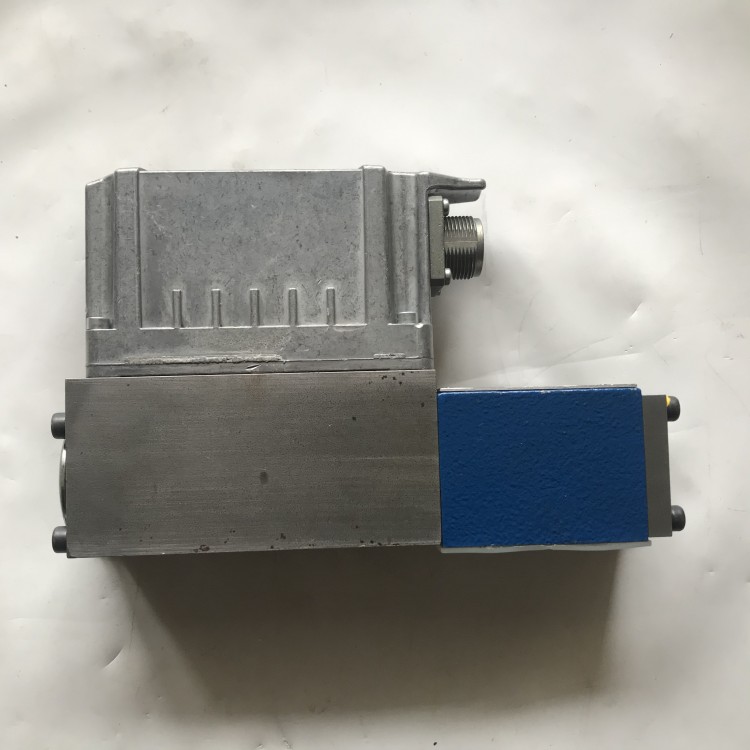
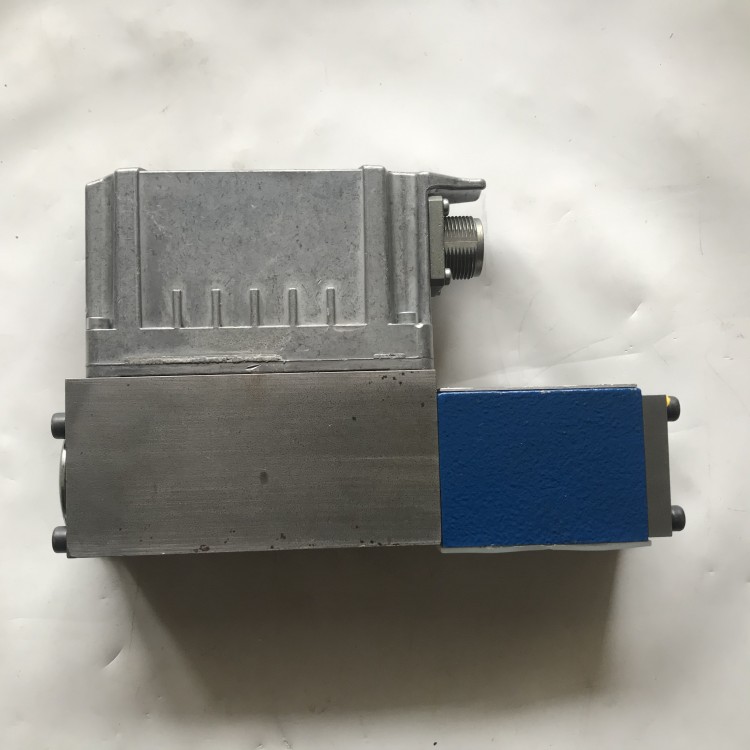
原装力士乐伺服比例阀4WRPEH6C3B40L-30/M/24F1价格好




常规型号:
R901382318 4WRPEH6C4B12L-30/M/24A1
R901412522 4WRPEH6C4B12L-30/M/24A1-561
R901382331 4WRPEH6C4B12L-30/M/24F1
R901431666 4WRPEH6C4B12L-30/V/24A1
R901382359 4WRPEH6C4B15P-30/M/24A1
R901382521 4WRPEH6C4B15P-30/M/24F1
R901382346 4WRPEH6C4B24L-30/M/24A1